MicrocompUTER System
System control by microcomputer


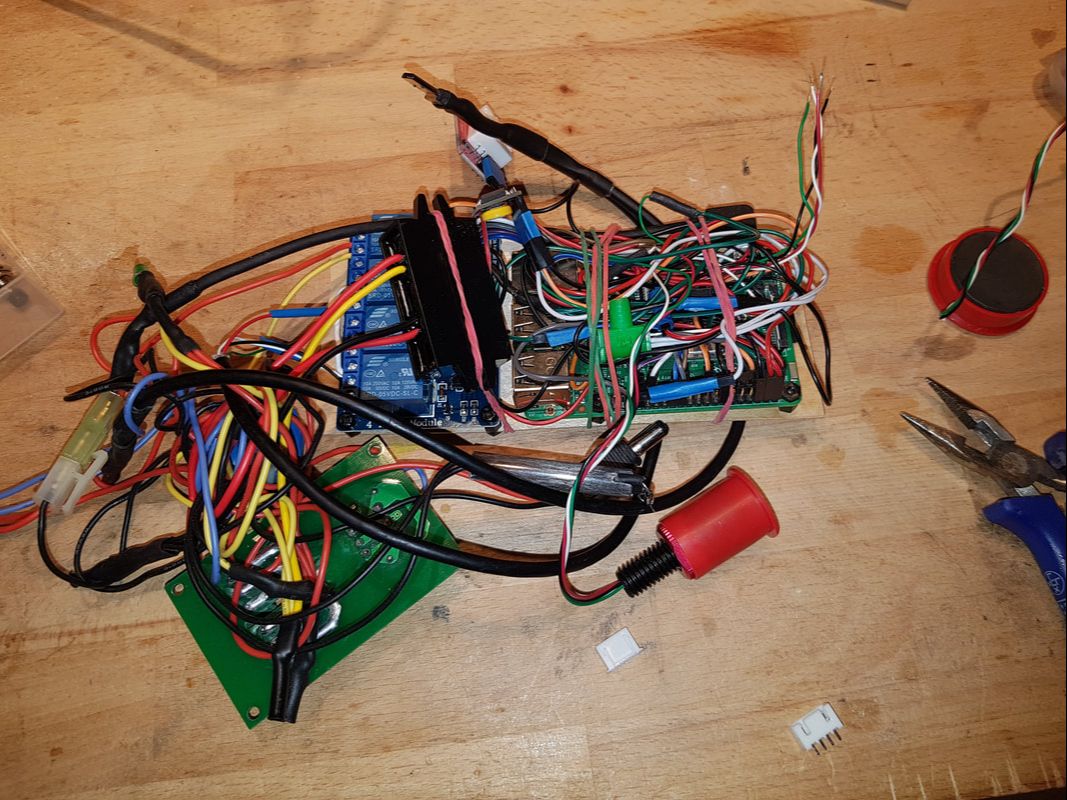
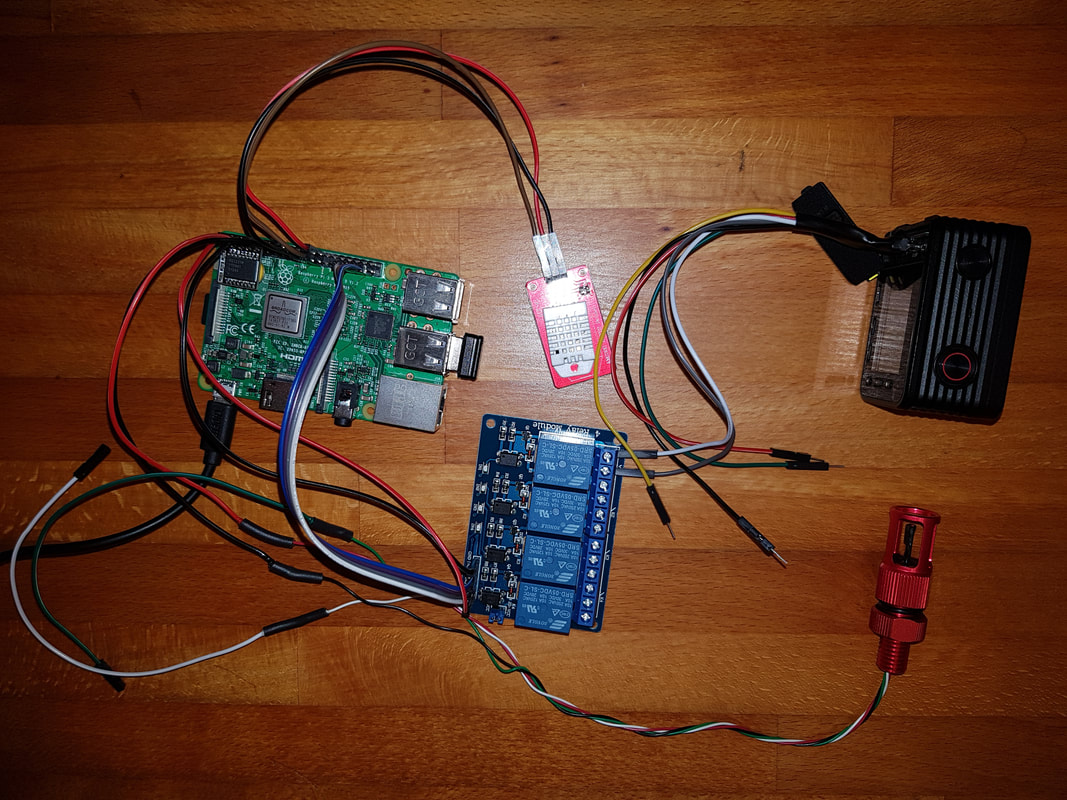
Microcomputer
A Raspberry Pi 3 was selected in order to enable a future system development with multiple options. While later models are more powerful, this one was selected to reduce power consumption. Programming language is Python 3.
Peripherie
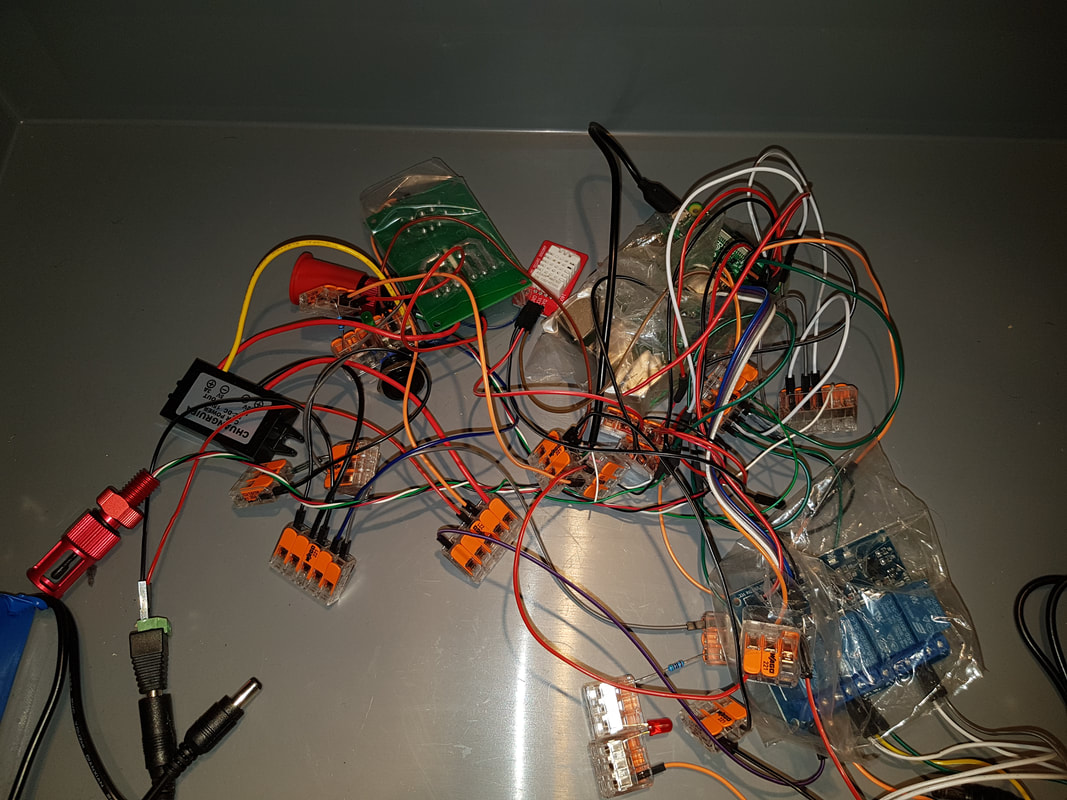
Triggering of events is done through a 4 port relais that is commanded via the Raspberry GPIO pins.
Camera
In order to be able to use still the same housing, a Sony RX0 was selected. While having a similar size as the GoPro, this camera has a larger 2.5 cm sensor. It is hoped that this will provide a better image quality under low light conditions.
The camera is connected through its multiport plug. A plug was purchased from mobileXcopter and cable were soldered for charging, camera on/off, focus and triggering. A relais triggers events through the Python program.
Sensors
A simple temperature/humidity sensor (DHT22) provides information about conditions in the housing.
While requiring future modifications of the housing, sensors for depth and exact water temperature have been foreseen (Bluerobotics). They are connected through an I2C protocol with the computer.
Future data logging is foreseen.
System start
Through combination of a Reed diode with a bistabile power relais and the Python autostart, the system can be prepared and the housing be closed while the system is off. When at the deployment site, a magnet, through the housing 2 cm plexiglas window, triggers the Reed contact, switches the power supply on and makes the computer boot. Then the programmed sequence is executed.
Power Supply
A 12 V Lithium battery with 6800 mA capacity provides energy also for longer deployments.
While the system was in principle operational, the set-up proved to be too big for the current housing. It was therefore put aside for now.
System in test phase with temporary connectors